Elasticsearch
什么是 ES
Elasticsearch是一个基于Lucene的搜索引擎。它是一个天然分布式,多租户能力的全文搜索引擎。Elasticsearch是用Java开发的,根据Apache许 可条款作为开源发布。
为什么要使用 ES⭐️
“之所以引入 ES,主要是为了解决关系型数据库在海量数据下的搜索性能瓶颈
“MySQL 在做模糊查询或者查询后得到的结果数据量太大时(如 LIKE %keyword%)会全表扫描,索引直接失效。而 ES 使用倒排索引,无论数据量是千万级还是亿级,都能在毫秒级锁定关键词,并且 ES 能够根据词频(TF/IDF 或 BM25 算法)给搜索结果打分,让最匹配的结果排在前面,而数据库只能简单地判断“有没有”。
其次,“MySQL 的分库分表非常复杂。而 ES 天生分布式,支持分片和副本机制。增加机器就能自动负载均衡,且即便某个节点挂了,副本分片也能自动升为主分片,高靠性很高。”
“在亿级数据下做 GROUP BY 或 SUM 统计,MySQL 基本就卡死了。ES 采用列式存储(Doc Values),非常适合做多维度的实时报表分析。”
ES 基础操作有哪些呢?
ES 是 RESTful 风格的,它的操作本质就是对 Index(索引) 和 Document(文档) 进行 HTTP 动作。
| 动作 | HTTP 方法 | ES 对象 | 对应 SQL |
|---|---|---|---|
| 创建/全量替换 | PUT |
/index/_doc/id |
INSERT / UPDATE |
| 创建(自动 ID) | POST |
/index/_doc |
INSERT |
| 查询 | GET |
/index/_doc/id |
SELECT |
| 局部更新 | POST |
/index/_update/id |
UPDATE ... SET |
| 删除 | DELETE |
/index/_doc/id |
DELETE |
PUT 与 POST 的区别:PUT 通常用于指定 ID 的创建,且具有幂等性(多次执行结果一样);POST 通常用于不指定 ID 的创建或局部更新。
- 可以更新整个资源。
- 客户端需要发送完整的资源内容。
- 如果服务器上不存在该资源,则会创建一个新的资源。
- PUT 请求具有幂等性,即执行多次 PUT 请求的结果应该相同。
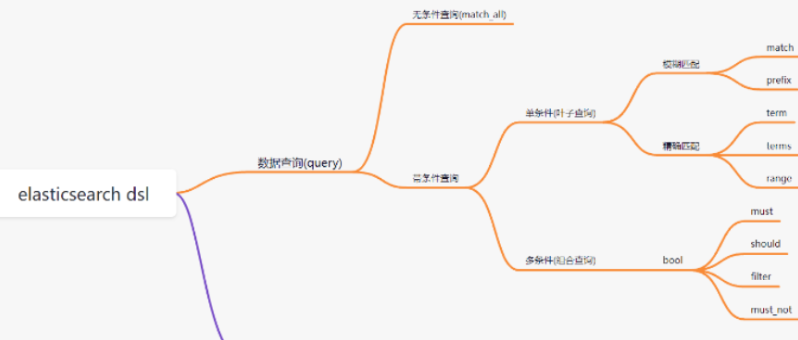
ES的DSL是什么?举个例子?
DSL (Domain Specific Language) 是 ES 特有的“领域特定语言”。
简单说:它就是一套基于 JSON 格式的查询语法。 因为 ES 功能太强(全文检索、聚合计算、地理位置查询),简单的 URL 参数根本塞不下这么多逻辑,所以得用 JSON 这种结构化的方式告诉 ES 你想要什么。
GET /orders/_search
{
"query": { // 1. 查询根节点
"bool": { // 2. 布尔组合查询
"must": [ // 3. 必须满足(计算相关性得分)
{ "match": { "product_name": "手机" } }
],
"filter": [ // 4. 过滤器(不计算得分,有缓存,性能高)
{ "range": { "price": { "gt": 5000 } } }
]
}
},
"sort": [ // 5. 排序
{ "price": { "order": "desc" } }
],
"from": 0, // 6. 分页偏移量
"size": 10 // 7. 每页数量
}
match 和 term 的区别?⭐️
match:模糊匹配。它会先对搜索词进行分词(比如把“小米手机”拆成“小米”和“手机”),然后再去匹配。term:精确匹配。它不会分词,直接去倒排索引里找完全一样的词,通常用于查 ID、状态、分类等。terms:也是精确匹配, 但它就像是 mysql 中的 in, 会精确匹配多个词!
match 和 prefix 的区别⭐️
match:全文检索(最常用)match 是 ES 中处理文本的核心武器。它的关键动作是分词
- 工作逻辑:当你搜索“华为手机”时,ES 会先用分词器把它拆成“华为”和“手机”,然后在倒排索引中去匹配这两个词。
- 相关性算分:它会计算文档的相关性得分(
_score),比如包含两个词的文档比只包含一个词的得分高。 - 使用场景:搜索文章内容、商品名称等需要理解用户意图的场景。
prefix 比较死板,它不分词,主要看开头。
- 工作逻辑:它是直接去倒排索引中查找以指定字符开头的词条(Term)。比如你搜
pre: "apple",它能匹配到 "apple"、"applegate"、"applesauce"。 - 性能开销:由于 ES 需要扫描大量以该字符开头的词条,如果前缀很短(比如只搜一个字母
a),性能会非常差。 - 使用场景:搜索框自动补全(Autocomplete)、搜索型号编码(如
SN-2026...)。
filter 和 must 区别?⭐️
must 是“全文检索”逻辑,不仅要匹配还要计算相关性得分来决定排名,性能消耗大;而 filter 是“硬性过滤”逻辑,只判断是/否而不计算分数,且自带缓存机制,性能极快。
在实际业务中,我们通常把用户输入的关键词放进 must,把业务逻辑的硬性限制放进 filter。
{
"query": {
"bool": {
"must": [
{ "match": { "title": "手机" } } // 关键词匹配,决定了哪个手机最“手机”,排在前面
],
"filter": [
{ "range": { "price": { "gte": 2000, "lte": 5000 } } }, // 价格区间,硬指标,不影响排序
{ "term": { "stock": "in_stock" } } // 是否有货,硬指标,不影响排序
]
}
}
}
简单介绍介绍多条件查询 bool ⭐️⭐️⭐️
在 Elasticsearch 的 DSL 查询中,bool 查询是构建复杂逻辑的核心节点。它类似于 SQL 中的 AND、OR 和 NOT 的组合。
bool 查询就是把各种单条件查询(如 match, term, range)按照逻辑关系拼装起来的“框架”。 它定义了搜索的精准度(must)和性能优化的空间(filter)。
-
must(相当于 AND)- 要求:文档必须匹配其中的所有条件。
- 算分:会计算相关性得分(
_score),匹配程度越高,分数越高,排名越靠前。
-
should(相当于 OR)- 要求:文档可以匹配其中的条件。如果
bool查询中没有must或filter,则至少要匹配一个should条件。 - 算分:会计算得分,匹配的条件越多,得分越高。
- 要求:文档可以匹配其中的条件。如果
-
filter(必须匹配,但不算分)- 要求:文档必须匹配。
- 算分:不计算得分。
- 性能:ES 会对
filter的结果进行缓存,因此执行速度极快。通常用于价格范围、日期范围、状态码等“是/否”类的硬性过滤。
-
must_not(相当于 NOT)- 要求:文档必须不满足其中的所有条件。
- 算分:不计算得分。
{
"query": {
"bool": {
"must": [
{ "match": { "title": "Java" } }
],
"filter": [
{ "term": { "status": "published" } },
{ "range": { "price": { "lte": 100 } } }
],
"must_not": [
{ "term": { "category": "trash" } }
],
"should": [
{ "match": { "description": "Spring Boot" } }
],
"minimum_should_match": 1
}
}
}
什么是列式存储 (ES Doc Values)⭐️
数据在磁盘上是按列排布的: - 时间列:[2023-01-01, 2023-01-01, ...] - 城市列:[北京, 上海, ...] - 金额列:[100, 200, ...]
“行式存储(如 MySQL)是按行存放数据的。在做 SUM 或 GROUP BY 时,即使只用到一个字段,也要读取整行数据,导致大量无效的 IO 消耗。
而 ES 的 Doc Values(列式存储) 将同一字段的数据连续存放在一起。在统计时,ES 能够实现按需读取,只加载参与计算的列,极大减少了磁盘 IO。
此外,列式存储天然适合压缩,并且利用 OS Cache 实现了近乎内存级别的计算速度。这就是为什么 ES 在处理亿级数据的实时报表分析时,性能远超传统数据库的原因。”
为什么 ES 做聚合统计比较快?
*极高的 IO 效率:只读需要的字段。如果你在亿级数据里只统计“金额”,ES 只需要读取那几亿个数字,而不用加载几亿个完整的文档对象。
更好的压缩率:同一列的数据类型通常是一样的(比如全是数字)。相同类型的数据放在一起,压缩效果极好,大大节省了磁盘空间。
直接映射内存:ES 的 Doc Values 实际上是保存在磁盘上的,但它利用操作系统的 文件系统缓存(OS Cache) 映射到内存中。这使得聚合计算几乎就像在内存中操作一样快。
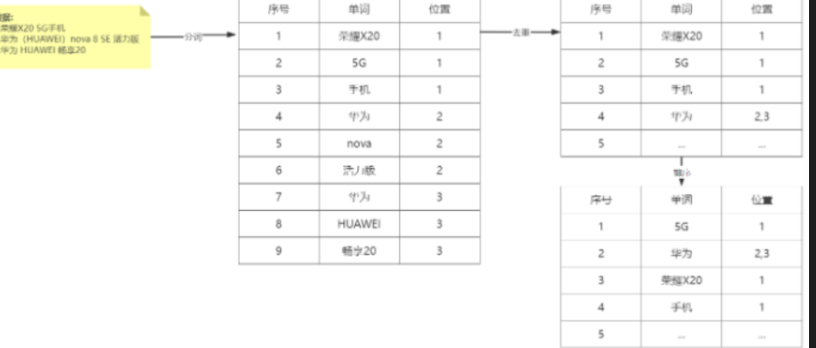
ES 怎么解决中文分词⭐️
Elasticsearch(ES)自带的默认分词器(Standard Analyzer)在处理中文时非常“笨”:它会把中文拆分成单个汉字。
IK 分词器是目前社区最流行的开源 ES 中文分词插件。它提供了两种最常用的分词模式:
ik_smart(最少切分):逻辑最智能,切分得比较粗,占用空间小。
ik_max_word(最细切分):把文本穷尽各种组合进行拆解,覆盖面广,增加搜索命中率。
ES 有什么缺点呢?⭐️ ⭐️
非强一致性:它是近实时(NRT)的,数据写入后默认有 1 秒延迟才能搜到。
维护成本:引入了数据同步逻辑,需要处理 MySQL 和 ES 之间的数据一致性问题。”
什么是倒排索引⭐️
倒排索引是 ES 的核心,也是 ES 搜索快的根本原因。正排索引:文档 ID \(\rightarrow\) 内容(类似书的目录)。而倒排索引就是由内容索引到包含该内容的文档 ID 列表
| 关键词 (Term) | 倒排列表 (Posting List) |
|---|---|
| Java | {docId: 1, freq: 2, pos: [0, 5]}, |
| Python | {docId: 2, freq: 1, pos: [3]}, |
| AI | {docId: 1, freq: 1, pos: [8]}, |
ES 是如何实现分布式存储的呢?⭐️⭐️⭐️
“ES 实现分布式存储主要靠 分片和副本 机制。 分片(Shard) 是为了解决单机瓶颈,它把一个大索引拆成多个小部分分布在不同机器上,实现水平扩容。主分片数在创建时确定,不可更改。
副本(Replica) 是主分片的备份。它有两个作用:一是高可用,主分片挂了副本顶上;二是负载均衡,副本可以分担读请求。
分片(Shard):解决“存不下”的问题
分片是 ES 存储数据的最小单元。一个索引(Index)会被水平拆分成多个分片。例如:当前有10万个文档,如果只有一个分片,那么这10万个文档都会在这台服务器中,单台服务器的磁盘和内存就爆了。但是我们可以拆为5个分片,分别存在5台机器上。
主分片(Primary Shard)的数量在创建索引时就得定好,后期不能改。因为数据的路由规则是 \(hash(id) \pmod{主分片数}\),改了分片数,以前存的数据就找不到了。
副本(Replica):解决“怕丢失”的问题
副本就是主分片的“克隆体”。目的是为了提高 ES 的可靠性以及读性能 1)主分片挂了,ES 会立即把一个副本分片提升为新的主分片,系统照样跑。 2)查询请求可以在主分片查,也可以在副本分片查。副本越多,并发查询的能力越强。
副本数是可以随时动态修改的。 同一份数据的主分片和副本分片绝对不会放在同一台机器上(否则物理机一炸,主副全丢,备份就没意义了)。
ES 的写入流程⭐️⭐️⭐️
ES 的写入可以分为 “集群层路由” 和 “分片层持久化”。
集群层:确定位置
- 客户端向集群中的某个协调节点(Coordinating Node)发送写入请求。
- 路由:协调节点根据文档 ID 计算它属于哪个主分片:
shard = hash(id) % number_of_primary_shards。 - 转发:协调节点将请求转发到该主分片(Primary Shard)所在的节点。
- 同步:主分片写入成功后,将请求并行转发给所有副本分片(Replica Shard)。
- 响应:当副本分片全部写入成功后,主分片向协调节点反馈,协调节点返回“成功”给客户端。
分片层:底层存储(近实时的奥秘)
数据进入分片后,经历三个阶段:
- Write Buffer:数据先写进内存缓存区(Index Buffer),同时记入事务日志(Translog)防止宕机。
- Refresh(默认 1 秒):缓冲区的数据每秒生成一个新的 Segment(段) 并写入操作系统缓存。此时数据即可被搜索到(这就是近实时的原因)。
- Flush(默认 30 分钟):将内存中的所有 Segment 真正落盘,并清空 Translog。
ES 的查询流程⭐️⭐️⭐️
ES 的查询分为两个阶段:Query(查询阶段) 和 Fetch(取回阶段)。
Query 阶段:找出“哪些数据”符合条件
- 协调节点接收到搜索请求,将请求广播到索引的每一个分片(主分片或副本选其一)。
- 每个分片在本地执行查询,根据相关性算分,排好序。
- 每个分片只返回一个轻量级的列表(包含文档 ID 和分数)给协调节点。
Fetch 阶段:拿出“真正的数据”
- 全局排序:协调节点收集所有分片返回的结果,进行全局排序,取出前 N 条(比如
from=0, size=10)。 - 拉取详情:协调节点根据这 10 个 ID,去对应分片请求完整的文档内容(_source 字段)。
- 最终返回:协调节点将数据组装好,返回给客户端。
为什么搜索是两阶段,写入不是?
写入时 ID 已知,可以精准定位分片;搜索时不知道哪些文档符合条件,必须“撒网式”去所有分片问一遍,然后再汇总。
深分页(Deep Paging)问题出在哪一阶段?⭐️⭐️
出在 Query 阶段。如果你查第 10000 页的 10 条数据,协调节点需要从每个分片各拿 10010 条 ID 过来,在内存里进行几十万条数据的全局排序。分片越多,内存压力越大,极易 OOM。
什么是深分页?
在 ES 中,深分页指的是请求 “页码非常靠后” 的查询操作。 比如一个索引有 1 亿条数据,你查询 from=100000, size=10(即跳过前 10 万条,取第 100001 到 100010 条)。最终只要 10 条数据,但为了保证这 10 条是全局范围内最匹配的,ES 的底层逻辑会变得非常沉重。
那怎么解决深度分页问题呢?⭐️
1、search_after(官方推荐:C端分页首选)
不使用 from 参数,而是通过上一页最后一条数据的唯一排序值(Sort Values)来定位下一页的起点。
发送请求: 你告诉协调节点:“我要查 10 条数据,但是请从坐标 [1642934400, "order_888"] 之后开始找。”
分片本地自查(重点改变在这里!):
- 分片 A 收到指令,它不再去数“前 1010 条”。它直接利用索引定位到
timestamp = 1642934400的位置。 - 它只拿在这个坐标之后的前 10 条。
- 分片 B、分片 C 同理,每个分片都只找坐标后的 10 条。
“为什么 search_after 排序字段必须包含一个唯一字段(比如 ID)?”
“因为如果排序字段(比如时间戳)不唯一,有很多条数据的时间戳都是一样的,那么这个‘坐标’就会变得模糊。ES 就不知道该从哪条数据后面开始取,可能会导致分页数据丢失或重复。加上 _id 这种唯一字段,就能保证坐标是全集群唯一的,定位才精准。”